Když se na konci 19. století začala používat jízdní kola, museli jste si na ně pořídit řidičský průkaz. Byla sestavena renomovaná komise pro výuku teorie a praxe řízení a pro vydávání registračních značek. Nikdo nesměl vozidlo vydat. Důvodem k opatrnosti bylo zvýšené riziko při řízení dvoukolového vozidla. Běžný člověk nechápe, proč se kolo při jízdě nepřevrátí. Překvapivě ani fyzikové, kteří se zabývají fungováním kolových systémů, nedokážou na tuto jednoduchou otázku jednoznačně odpovědět.
Teoretická analýza a fyzikální experimenty ukázaly, že gyroskopický moment a kladný zdvih vidlice nejsou pro stabilitu kola dostačující. Kromě řízeného řízení je k dispozici také automatické řízení. Klíčovou roli při udržování rovnováhy navíc hraje rozložení zátěže. Jak je vidět, díky poměrně dlouhé životnosti motocyklu se stále objevují a zdokonalují nové vlastnosti.
Proč se kolo při jízdě nepřevrátí
Pro vysvětlení snadného úkolu se často používá metafora: „je to stejně jednoduché jako jízda na kole“. Ve skutečnosti je třeba zabránit pádu dopravních prostředků. Zpočátku se myslelo, že kolo jezdí na úkor jezdce. Osoba vycítí sklon konstrukce, mírně natočí řídítka ve směru pádu a vyrovná jízdu. Při vysoké rychlosti však kolo získá stabilitu a nespadne, ani když se uvolní řídítka. Později se objevily hypotézy o gyroskopickém působení předního kola a řízení. Ukázalo se však, že neřízená kola a robotičtí cyklisté také nepadají.
Hlavní otázka ohledně příčiny stability zní: co způsobuje vhodný vztah mezi náklonem a zatáčením? Obecně je přijímán názor, že k tomuto efektu dochází v důsledku rotačního (gyroskopického) momentu a kladného dosahu vidlice. Stabilizační účinek předního kola a odstředivá síla způsobená vychýlením pohybu z přímé dráhy jsou nezbytnými faktory rovnováhy kola.
Z fyzikálního hlediska
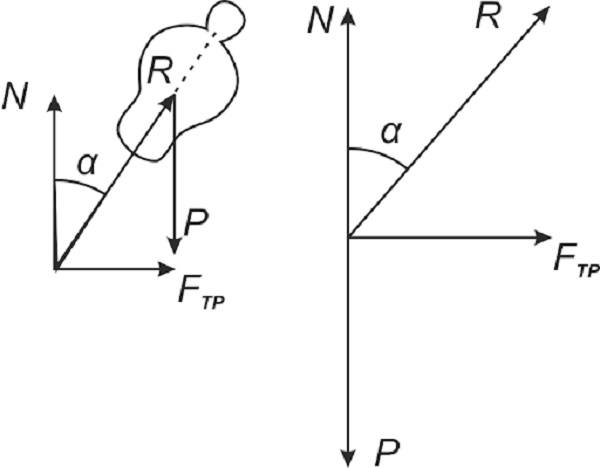
Vědci identifikovali vzorec, který udržuje stabilitu dvoukolových vozidel. Přední vidlice je v centru pozornosti. Uspořádání spočívá v naklonění osy řídítek vůči zemi. Bod křížení se nachází před linií dotyku kola jízdního kola s vozovkou. Pokud se úhel natočení řídicí páky odchýlí od nastavené hodnoty, vytvoří se reakční síla, která vrátí transportér zpět do polohy. Kolo tak samo pomáhá udržovat rovnováhu.
Aby jezdec mohl zatočit, musí změnit těžiště. Například při náklonu kola doprava je přední náprava také nakloněna doprava a kolo, které se otáčí ve směru hodinových ručiček (při pohledu zespodu), částečně přenáší reakční moment na řídicí jednotku. Odstředivá síla má tendenci natáčet volant doprava. Při zatáčení se cyklista nakloní doleva, čímž vychýlí kolo a kola doprava.
Druhým faktorem, který slouží ke stabilizaci vozidla, je nabírání rychlosti při zpomalování a řízení. Stabilizace vrací kola do správné polohy a zabraňuje převrácení kola. Zkušený cyklista používá ruce na montážních bodech, aby řídil 2-3 mm do vozovky.
Gyroskopický efekt
Teorie rovnováhy je založena na dobře známém fyzikálním jevu, který se používá ve vesmíru, letectví a námořní navigaci. Vlastnost rotujícího objektu udržovat směr pohybu se nazývá gyroskopická síla. Tento jev se projevuje při jízdě na nakloněném kole. Dokud se kola otáčejí, vozidlo drží rovnováhu a nikdy se nepřevrátí. Například vrtulník pro děti nebo děti „funguje“ pouze tehdy, když se točí. K ověření hypotézy vytvořili fyzikové speciální konstrukci kola. Vpředu bylo instalováno další kolo, které se nedotýkalo země a otáčelo se vopačném směru. Výsledek experimentu vědce překvapil. Kolo se pohybovalo perfektně a bez gyroskopu nespadlo.
Poté, co byly potvrzeny hlavní faktory, které ovlivňují stabilitu dvoukolového vozidla v pohybu, vědci stále diskutují o nových verzích.
Zajímavá fakta
V.A. Jakubovič
- Matematickou teorii vysvětlující stabilitu jízdního kola v pohybu předložil doktor věd V. A. Jakubovič. Vědec vysvětlil, proč ještě nikdy nebyl vytvořen autonomní robot ovládající jízdní kolo. Informace o mechanických cyklistech kolující po internetu se ukázaly jako falešné. Bližší pohled na kybernetika odhalil řadu triků. Vynálezci připevnili závaží, aby zvýšili stabilitu konstrukce, snížili těžiště a zrychlili jízdní kolo na vysokou rychlost.
Odpůrci vědce dokazují opak. Robot se učí velmi rychle. Je to dáno relativní jednoduchostí úkolů: musíte se pouze naučit udržet rovnováhu. Má schopnost, kterou člověk nemá: reaguje okamžitě a „škubne“ volantem pětkrát za sekundu.
- Jízdní kolo bez jezdce se dokáže automaticky řídit, aby se nepřevrátilo,“ tvrdí američtí vědci. Díky linearizovaným výpočtům stability výzkumníci navrhli kolo s přídavnými koly otáčejícími se v opačném směru a s negativním postavením řídítek.
- Pohled psychologů se liší od pohledu fyziků. Zdroje energie kola jsou v hlavě jezdce. Lidský mozek se usilovně snaží, abychom nespadli. Umění a dovednost spočívá v podvědomých postojích, které udržují cyklistu v rovnováze.
Závěr
Důkazy potvrzují význam gyroskopu a kolečka pro udržení stability kola během jízdy. Neexistuje však jasné vysvětlení, proč se kolo při jízdě nepřevrátí. Může existovat další síla, jejíž pochopení je dočasně mimo současné znalosti.






Přesto si myslím, že kolo při jízdě nespadne, protože jezdec udrží rovnováhu a koriguje ji natočením řídítek ve směru pádu. Účinek gyroskopického momentu na kolo při jízdě je nepravděpodobný, rychlost kola a hmotnost kola nejsou dostatečně velké, aby vytvořily reaktivní moment.
Experiment s řízením nepotvrdil, že jezdec drží rovnováhu. Když na kolo bez jezdce silně zatlačíte, pojede a nepřevrátí se, ani když se zaseknou řídítka.